Free Flight FF Auto Balance Controller with 3D Acceleration Sensor
Description:
- 100% brand new four axis Free Flight FF Auto Balance Controller,it can be used without debugging.
- Support 8 channel PWM input and Six channel PWM output
- Adopts three axis digital gyroscope and three axis digital accerleration sensor.
- Auto-balance,quadcopter X or+mode
- Support commercial ESC and I2C ESC
- Support aerial photography and Dual axle stabilization PTZ
- with beep function when voltage is lower than 10.8V
- recommend work with GWS 3-blade paddles or other high performance balance paddles
Wire Connection:
- Input CH: 1, Aileron/ flap 2 Lift and down 3,accelerograph 4,Heading Direction 5,Remote control calibration( Switch channel) 6,PTZ pitch angle 7, PTZ pitch angle trimming(ratio CH input)
- Output CH(PWN): 1, PTZ Pitch angle servo 2, PTZ roll servo, 3, No.1 motor input 4,No.2 motor input 5, No.3 motor input 6,No.4 motor input
Dual axis PTZ:
- It maintains verticality mode under 6CH Auto-mode.It can be trimming by button 7 to adjust angle. 
Software Tool
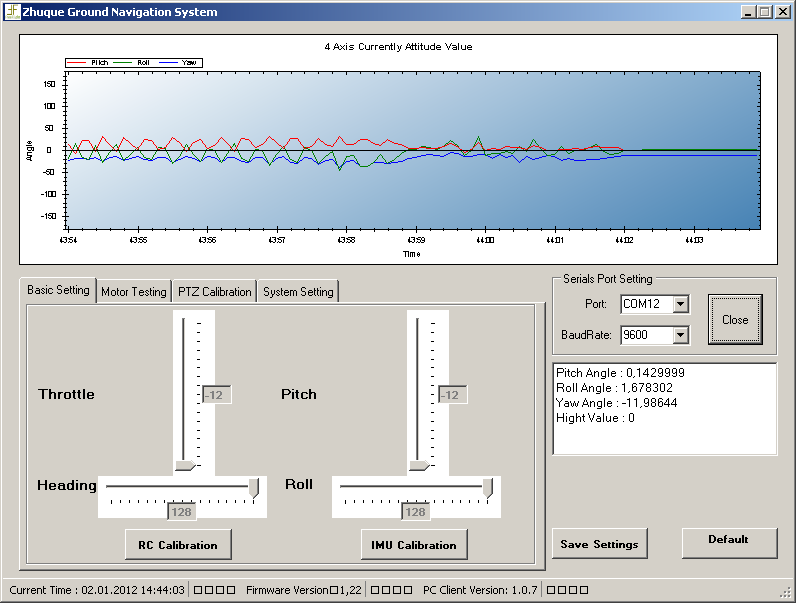





http://www.rcdon.com/html/mr1_hexacopter_project.html
下面內容引用作者敘述
Because the MEMS type sensors used on this board use vibrating structure technology to sense movement they generally require a low vibration surface to mount to. Any high frequency vibrations can throw off the sensors and disable the control board. This is why I must devise a vibration absorbing system for the board which will isolate the sensors from any disruptive vibration caused by the brushless motors.
For this I am going to use a set of silicone tubing pieces to make a set of shock absorbers that will hopefully null out any vibration from the motors of the copter. I am going to use some plastic tubing “studs” to attach the board to the tubing pieces as seen below.













沒有留言:
張貼留言